Lecture 01
人类学习:
机器学习:
机器学习目的:
unknown target function:
f:X→Y
机器学习过程:
A takes D and H to get g
A 是机器学习算法
D 是数据
H 是公式集合
g ≈f 的假设
Lecture 02
Vector Form of Perceptron Hyponthesis
h(x)=sign((i=1∑dwixi)− threshold )=sign⎝⎛(i=1∑dwixi)+w0(− threshold )⋅x0(+1)⎠⎞=sign(i=0∑dwixi)=sign(wTx)
Perceptrons in R2
x: points on the plane( or points in Rd), h: lines ( or hyperplanes in Rd)
h(x)=sign(w0+w1x1+w2x2)
label y: +1 or -1
perceptrons ⇔ linear (binary) classifiers
Select g from H
- want: g ≈f
- difficult: H is of infonite size
- idea: start from some g0
Perceptron Learning Algorithm
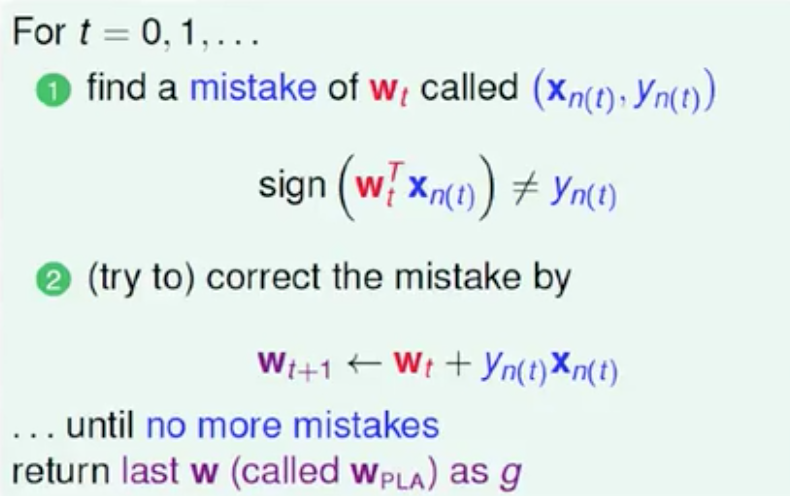
sign(wtTxn(t))=yn(t)
wt+1=wt+yn(t)xn(t)
−A fault confessed is half redressed. :-)
Definition 1.1: wf satisfies yn=sign(wfTxn)
Then: wt get more aligned with wf
(i)
yn(t)wfTxn(t)≥nminynwfTxn>0
wfTwt+1=wfT(wt+yn(t)xn(t))≥wfTwt+nminynwfTxn>wfTwt+0
(ii)
wt changed only when mistake ⇔sign(wtTxn(t))=yn(t)⇔yn(t)wtTxn(t)≤0
∥wt+1∥2=∥∥wt+yn(t)xn(t)∥∥2=∥wt∥2+2yn(t)wtTxn(t)+∥∥yn(t)xn(t)∥∥2≤∥wt∥2+0+∥∥yn(t)xn(t)∥∥2≤∥wt∥2+nmax∥ynxn∥2
start from w0=0, after T mistake corrections,
∥wf∥wfT∥wT∥wT≥∥wf∥∥wT∥T⋅minnynwfTxn≥∥wf∥⋅T⋅maxn∥xn∥T⋅minnynwfTxn≥T⋅∥wf∥⋅maxn∥xn∥minnynwfTxn≥T⋅ constant
Pros:
- simple to implement, fast, works in any dimension d
Cons:
- Assumes linear separable
- not fully sure how long halting takes
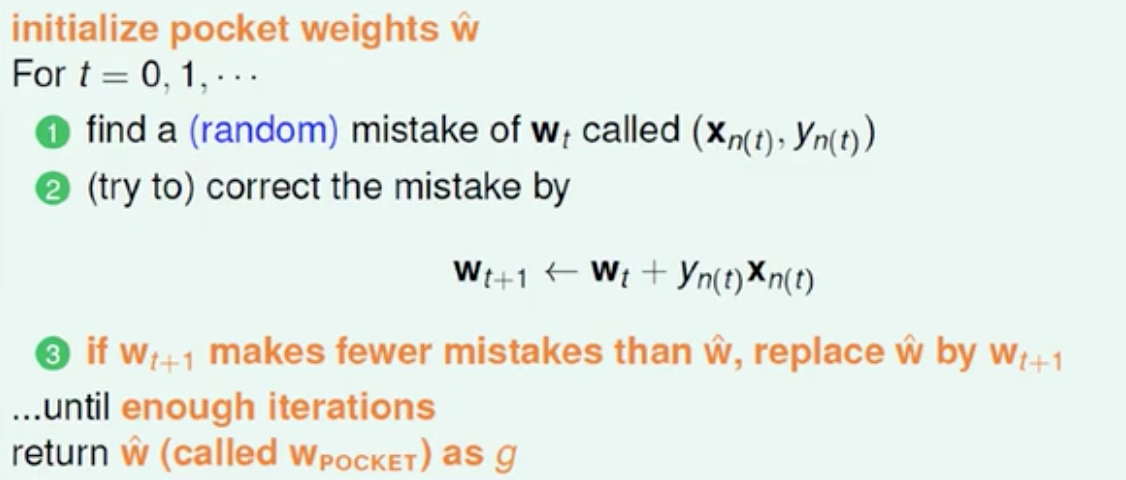
Learning with Noisy Data
Pocket Algorithm